UAV and LiDAR Services
Enabling and supporting UAV and LiDAR use for research and teaching at Clemson


Blake traveled with the NSF Structural Engineering Extreme Event Recon team to assess damage to buildings from wind and water after Hurricane Florence

A 3D point cloud of west Folly Island, SC created for Clemson Geopaths by CCGT.
The Clemson Center for Geospatial Technologies provides integrated services and support for use of unmanned aerial vehicles/systems (UAVs, or drones) and LiDAR at Clemson across many disciplines and applications. These resources include shared equipment resources, data processing software, training and educational materials, and remote pilot services. CCGT wants to work with you to integrate our resources into your classroom activities, research projects, and proposals. Learn more about available resources from CCGT as well as policies and regulations regarding use of UAVs at Clemson.
Please contact us using this form to let us know how we can assist!
Meet our Experts
Patricia Carbajales-Dale

Patricia Carbajales-Dale serves as the Executive Director of CCGT, where she provides vision, leadership, and strategic direction of the Center’s programs and initiatives. In addition, she is a FAA Pt107 Certified sUAS Pilot and oversees CCGT's UAV program.
Jared Gingrich

Jared is the Center's UAV and LiDAR specialist and an FAA Remote Pilot. He provides pilot services, equipment operation and data processing services, and develops workflows and training resources for the University. He is excited to help your project get off the ground.
Dr. Christopher Post

Dr. Post is the faculty associate advising the UAV Program and a professor in the College of Agriculture, Forestry, and Life Sciences. He has many years experience with UAV and LiDAR applications, is an FAA Remote Pilot, and leads the Clemson Environmental Information Science Laboratory.
Gakumin Kato

Gakumin is our GIS Manager and an FAA Remote Pilot.
Gakumin supports instruction, class support, licensing, and project collaboration in all of our UAV and LiDAR initiatives.
What We Provide
Shared Equipment Resources

We have a variety of high-quality UAVs, including survey-grade drones and multispectral data capabilities, as well as a terrestrial LiDAR scanner.
These shared resources offer advanced data collection abilities and are an alternative to purchasing and maintaining your own equipment. Contact us for rate information and assistance incorporating into your grant proposals.
Multi-rotor and fixed-wing UAVs at CCGT
Geospatial UAV and LiDAR support
Imagery and Geospatial Products



UAVs can rapidly provide up-to-date, high-resolution geospatial products:
-
Aerial orthophotos
-
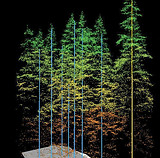
3D point clouds
-
Digital elevation, terrain, and surface models
-
3D textured meshes
-
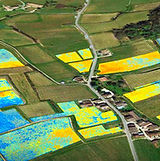
Multi-spectral imagery
Use Clemson's software and computing resources to create these products or use CCGT all-in-one services for your project
Processing Software and Workflows

Crunching imagery data to produce new products can computationally intensive. We are acquiring software resources for processing data and combining these with Clemson's advanced computing infrastructure to maximize efficiency.
We provide materials and training to guide you through the processing workflow.
UAVs in Teaching Curriculum

The use of UAVs and LiDAR is at the leading edge in many fields and disciplines. We are excited to work with instructors to incorporate UAVs and LiDAR into your lesson plans and student research projects.
FAA Certified Pilots

Under the FAA small unmanned aircraft regulations, any use of UAVs as part of a research project requires an FAA remote pilot certification.
CCGT pilot services can be used along with our shared UAVs for your research projects or grant proposals, can fly your aircraft, or act as remote pilot in command with your crew.
Integrated UAV Services
We can combine our services to fit your specific project needs or to get your grant off the ground. CCGT can provide custom services including:
-
Aircraft and Pilot time
-
Data processing
-
Geospatial products
-
Training materials
-
and more!
Equipment Information
LiDAR-equipped Rover System

Clearpath Robotics Unmanned Ground Vehicle equipped with LiDAR, GPS, IMU, stereo cameras:
-
Run time 3 hours
-
Max speed 2.2 mph
-
Max payload 165 lb
-
Dual antennas GPS
-
Outdoor autonomous navigation
LiDAR-equipped UAV System

LiDAR USA Snoopy A System:
-
Velodyne puck-based system captures 300+ points per square meter
-
Novatel STIM300 IMU for accurate orientation
-
DJI Matrice M600 platform
-
Total system accuracy +/- 2 cm
Sensefly eBee+

Fixed-wing photogrammetric mapping system:
-
Covers up to 500 acres per flight
-
60 minute flight time
-
Multispectral and RGB data in single flight
-
On-demand RTK GPS capability
Hyperspectral UAV System

Headwall Nano VNIR System:
-
Very near infrared (VNIR) sensor operates between 400-1,000 nm
-
Maps 270 spectral bands as a 3D data cube
-
240 spatial bands
DJI Phantom 4 RTK

Quadcopter style UAV:
-
20 MP camera can capture 4K video
-
1 cm+1 ppm horizontal positioning accuracy
-
1.5 cm+1 ppm
vertical positioning accuracy -
5 cm absolute horizontal accuracy
of photogrammetric models
DJI Phantom 4 Pro

Quadcopter style UAV:
-
20 MP camera can capture 4K video
-
28 minute flight time
Faro Focus M70 LiDAR Scanner

Portable scanner with 70 meter range
-
Can be used indoors & outdoors
-
3 mm accuracy
-
Captures RGB for true-color info
Parrot Bebop 2

Lightweight quadcopter style UAV
-
Fisheye camera captures full HD
-
25 minute flight time
-
Weight <1 kg
Applications
Agriculture and Crop Science
-
Plant and crop health
-
Vegetation index (NDVI) mapping
-
Yield characterization
-
Site mapping
-
Time lapse growth tracking
-
Pest monitoring
Civil Engineering and Architecture

-
Structural health monitoring
-
Building measurement
-
Highway characterization
-
Site surveying
-
Contour line generation
-
Solar PV potential
-
Erosion monitoring
-
Remediation site assessment
Forest Resources
-
Storm damage assessment
-
Forest classification and inventory
-
Tree height determination
-
Plant health and disease detection
-
Time lapse monitoring
-
Vegetation index mapping
-
Wildfire assessment
Archaeology, History, and Preservation
-
3D models of site and features
-
Excavation documentation
-
Looting monitoring
-
Historical site preservation
-
Restoration and renovation planning
Earth Sciences

-
Morphology studies
-
Coastal management
-
Flood and disaster management
-
Mass wasting and landslide mapping
-
Slope measurement
-
Watershed delineation
-
Site survey
-
Outcrop mapping
-
Soil erosion monitoring
Life Science, Ecology, and Conservation
-
Population surveys
-
Wildfire assessment
-
Habitat management
-
Biomass estimation
-
Treatment evaluation
-
Invasive species monitoring
Data Examples
Requesting Services
Summary
Any use of a UAV as part of a Clemson research project must follow both Clemson University policy as well as the new Federal Aviation Administration (FAA) Small Unmanned Aircraft Regulations (Part 107). The good news is that it is now possible to fly UAVs without obtaining a (big plane) pilot’s license.
-
It is not possible to fly under the ‘hobby’ rules and doing so could subject both you and Clemson University to significant regulatory consequences.
-
Any research use of UAVs falls under the “Fly for Work/Business” FAA regulations.
Clemson UAV Policy
Clemson University has developed a policy for UAVs (drones) that is updated on a continuing basis This policy covers both the hobby use on Clemson owned property and use of Clemson owned UAVs used as part of Clemson projects.
-
The current policy is available here.
-
Clemson UAVs are required to have liability insurance. For current information, contact Linda Rice with the CU Office of Risk Management.
Important FAA Links
Informational Resources
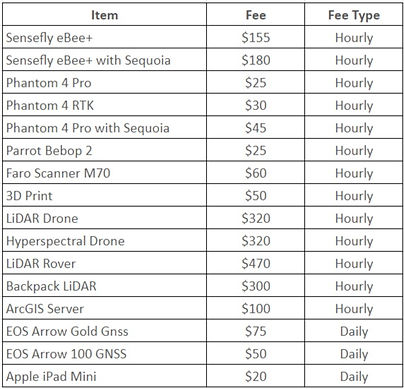
If you are interested in our resources and services you must submit a request using the form to the right. A service agreement must be created prior to the start of work which defines the scope of services provided, customer responsibilities, timeline, infrastructure and equipment fees, and staff rates. Visit our Policies page for more information.
Service Pricing